製造系統模擬04-建構AGV模擬教學(0)之Arena的物件運送
前言:
在工廠逐步往自動化發展的同時,工廠內的物料搬運經常交由無人搬運車(Automated Guided
Vehicle,AGV)來完成,而足夠符合工廠需求的AGV價格仍相當高昂,因此在導入前須要進行精確的評估,才能夠找出符合工廠內搬運需求情況下需要的AGV數量。
然而,在《Simulation with Arena》[1]中,第五版的內容當中沒有用足夠多的篇幅談到應用到AGV,僅用了7行的篇幅交代完原因。不過其實再另外一本教科書《Simulation Modeling and Arena》[2],則清楚地描述了一個簡單的AGV範例,會在我的下一篇文章《製造系統模擬06-建構AGV模擬教學(1)之Arena的Network、Network Link》先說明範例建構要使用到的模組,未來也會寫文章介紹可以用於評估實際工廠的AGV數量配置的模型。
因此,本文旨在於:
一、回顧過去學習的物件運送模擬手法
二、在Arena中的物件運送的資源分類
三、AGV的種類與模擬概念
正文:
首先,在[1]的8.1小節物件運送的種類(Types
of Entity Transfer)中提到過去幾章所學習到的物件運送的方式,而我在此詳加描述。
方式一-Connect: 連接兩個模組(module),直接將物件/實體(Entity)在兩個模組間運送且沒有時間上的延遲。
(補充說明)
透過Toolbar上的Connect,其實我們就達成了物件/實體的傳送。
方式二-Route指定站點運送: 透過路徑(Route)的建立,讓物件/實體在兩個站(Station)之中移動且運送有時間的延遲。(實際作法參考下圖一)
(補充說明)
在Route time中我們可以設定傳送花費的時間;Destination Type選擇Station則我們就需要決定要填入的Station Name。
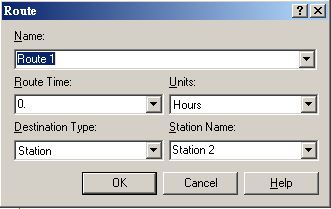 |
Route指定站點運送
|
方式三-Route根據序列運送: 透過建立序列(Sequence),讓物件/實體依照所設定的序列進行運送。
(補充說明)
如果我們選擇了Destination Type是By Sequence(依照序列設定),則我們要先對運送的物件/實體設定屬性Entity.Sequence
(透過Assign module達成),這樣才能指定他要走過站點的順序;同時Sequence對應的資料中,我們也要預先建立,不然也會發生錯誤。
 |
Route根據序列運送
|
 |
| 指定物件/實體擁有的屬性序列 |
而上述3種方式,其實都少考量到一個點,就是運送資源的限制。在[1]書中也提到「我們有時候會發現有必要去限制或約束在任何一個時間點上能夠發生的運送數量(We
sometimes find it necessary to limit or constrain the number of transfers
occurring at any point in time」。無論是工廠內常見的輸送帶(Conveyor)、堆高機(Forklift)、AGV等設備,亦或是推著台車的物料搬運人員、線邊的水蜘蛛(註一)。
在[1]的8.1小節也說到針對不同的物料搬運(material handling)系統,建模的需求可以變化非常大,而且不同的物料搬運設備的數量是非常多的。所以書中根據物料搬運設備會面臨到的限制,去區分前面所述的很多不同的搬運設備。
分類準則有:
1.
可以被使用的獨立物料搬運設備的數量(the number of individual material-handling devices available)
2.
空間可用度(space availability)
在這兩種分類準則下,屬於前者的分類下的物料搬運設施包含了台車、手推車、堆高機、AGV或是人,這些獨立的資源,我們都需要知道他當下實際的物理位置。當有運送的需要時,我們必須要先移動設備到需要搬運的物件旁,才能夠開始進行運送。從這個角度來看,這樣的設定就相當於是一個”可以移動的資源”(moveable resources),在Arena中稱之為Transporter。而後者運送開始的條件則是根據空間使用度,他限制了在兩個位置之間可以同時被搬運的數量,而這個限制來自於被搬運的物料所需要的空間大小,可以分進後者這個類別則包含了:輸送帶、單軌吊車(overhead trolleys,註二)等。
在書中,對於空間可用度這個類別,有講解建構一個輸送帶,而針對有搬運設備限制,也有提到如何使用Transporter建立模型,使用到像是Sequence說明如何從A站移動到B站,Distance這樣的模組來描述從A站移動到B站的距離。我們可以將其視為建構的方法五與方法六。
而究竟我們要如何建構AGV相對應的模型,因為它不但限制了可移動的資源量(擁有的AGV台數),同時還要考量實體路徑使用上的限制,這個限制可能來自於:
1.
路徑只能單一方向或是雙向
2.
路徑上的交叉點能停靠的車輛數
3.
路徑上行駛的速度限制
簡言之,AGV這種搬運設備在模擬中是有導引式的(Guided)而非是自由路徑(Path-free),因此路徑的限制才需要被納入。
所以這時候就需要用到第五版沒有特地介紹的模組Network、Network link,如果需要知道更詳細的內容,就歡迎點擊以下聯結觀看製造系統模擬06-建構AGV模擬教學(1)之Arena的Network、Network
Link
註一: 水蜘蛛(Water Spider),是生產線上專門從事生產看板、物料的準備和傳遞的人員。其在配料區、產線超市之間來回快速的運動,確保在恰當的時間提供恰當的物料,達到供料及時且數量準確。說明引用自[3]
註二:單軌吊車是直譯的中文,如果要舉出工廠內實際的案例,那我認為有兩個比較好了解的例子,一是屠宰場中的掛架,二是自動噴漆線上的掛架。這個例子掛架都接在對應的一個履帶,履帶的長度有限制,再依據掛架的大小,我們就能夠知道履帶上能放的掛架數量,因此符合空間可用度的限制這個一分類。
參考文獻:
[1] Kelton,
W.D, et al., 2010,Simulation with Arena, 5th edition, McGraw Hill, New York
[2] Manuel
D. Rossetti, 2016, Simulation with Arena, 2nd edition, John and Wiley & Son,
Inc., New Jersey
[3]
智慧工廠(2017),「內部物流之水蜘蛛(Water Spider)的標準作業與設計步驟」(取得日期:2019年1月21日),[available at https://kknews.cc/zh-tw/design/8xp8yen.html]
https://shuohsuanli-bear.blogspot.com/2020/03/Arena06NetworkandNetworkLink.html
回覆刪除